
Система для автоматического анализа автомобильного трафика по видеопотоку / Smart Traffic System
Новость
Реализовано: 23 января 2021
Нам нравятся результаты, которые наблюдаем. Было принято правильное решение – разрабатывать детектор своими силами.
Система для автоматического анализа автомобильного трафика по видеопотоку / Smart Traffic System
Новость
Реализовано: 11 января 2021
Решение принято: разрабатываем свой детектор и пересматриваем оборудование.
Система для автоматического анализа автомобильного трафика по видеопотоку / Smart Traffic System
Новость
Реализовано: 6 января 2021
Доработка текущего детектора требует привлечение дополнительных специалистов, длительного времени и соответственно дополнительных трат – это противоречит нашей концепции. Мы хотим отстроиться от конкурентов и создать более доступное цифровое решение. Будем искать другое решение.
Система для автоматического анализа автомобильного трафика по видеопотоку / Smart Traffic System
Новость
Реализовано: 5 января 2021
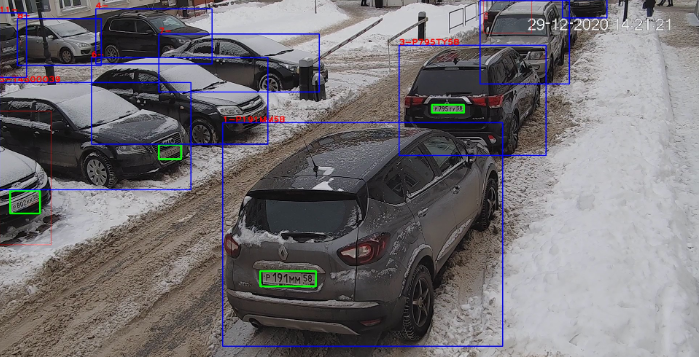
По факту пилотирования нашего продукта «Умные парковки», мы решили обновить техническую реализацию системы. Это связано с тем, что используемый детектор не отвечает требованиям системы, а количество камер не позволяет точно распознавать гос. номер и марку автомобиля, что влияет на бесперебойность парковочной сессии.

Новость
Реализовано: 15 июня 2022
Проект прошел предакселерацию на Архипелаг 2022!
Новость
Реализовано: 22 мая 2022
За 3 дня до закрытия подачи заявок на акселератор «Архипелаг 2022», мы сделали это!
Новость
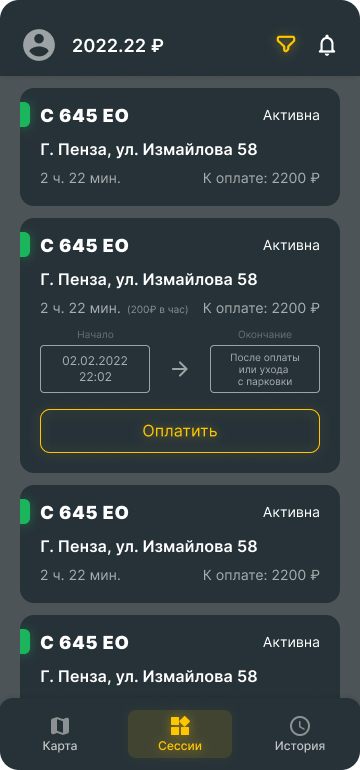
Реализовано: 13 марта 2022
Снимки парковочных сессий.

Новость
Реализовано: 12 марта 2022
Разработали версию распознавателя – 0.5. Преобразование версии 0.4 путём исправления багов и преобразования логики. 1. Исправлен метод фиксации отъезда авто. При перемещении авто в кадре его трек теряется (стираются его признаки). После этого он может восстановится, если авто на самом деле не уезжало, а детекция была ложной. 2. Исправлен метод сохранения фото авто в состоянии покоя для правильной реализации восстановления потерянного трека. Теперь фото сохраняется при отсутствии любых движений в кадре. 3. Исправлена логика по удалению треков (закрытие сессий) для закрытия всех сессий (в версии 0.4 – 15,34% сессий не было закрыто из-за ошибки в логике). Каждый трек перед удалением проверяется на факт парковки. При нахождении данных о том, что авто было припарковано, отправляются данные о его отъезде (время и последнее фото). На данном этапе было также осуществлено тестирование системы на парковке. Верно обработанные сессии: 55/59 (93,22%). В ходе тестирования были найдены номера, которые не были прочитаны распознавателем из-за низкого качества изображения или загрязнённости области номера. Номеров, распознанных неверно и подтверждённых распознавателем как верные, обнаружено не было.
Новость
Реализовано: 7 февраля 2022
Результаты тестирования на данном этапе. Поиск рамки номера: 507/558 (90,86%). Чтение символов: 419/ 507 (85,6%). Результативность чтения символов упало из-за нахождения рамок номера плохо качества (не читаемые символы), а также добавления логики чтения квадратных номеров. На данном этапе было также осуществлено тестирование системы на парковке. Верно обработанные сессии без учёта правильности чтения номера: 265/313 (84,66%).
Новость
Реализовано: 24 января 2022
Доработали ЛК водителя.
Новость
Реализовано: 13 января 2022
Разработали версию распознавателя – 0.4. Первая версия, позволившая осуществить тестирование на парковке. 1. Добавлена возможность чтения квадратного номера (номер в 2 строки). 2. Поиск авто осуществляется с помощью улучшенной версии нейросети №1 вместо предшествующей. 3. Добавлен детектор движения в кадре для экономии ресурсов при вычислениях. При неподвижном кадре работа трекера «замораживается», так как все авто находятся в покое. 4. Номер автомобиля не вычисляется до тех пор, пока тот не припаркуется. 5. Поиск рамки номера осуществляется внутри найденной рамки припаркованного авто. 6. Добавлено восстановление потерянных треков путём сравнения изображения авто в состоянии покоя и текущего изображения. Решение поддерживает неразрывность парковочной сессии.
Новость
Реализовано: 23 ноября 2021
Результаты тестирования на данном этапе. Поиск рамки номера: 493/558 (88,88%). Чтение символов: 422/ 493 (85,6%). Результативность чтения символов упало из-за нахождения рамок номера плохого качества (не читаемые символы).
Новость
Реализовано: 12 ноября 2021
Разработали версию распознавателя – 0.3. Основная идея версии – улучшение решений проекта с открытым исходным кодом. 1. Добавили адаптивное изменение контрастности найденного номера для повышения качества чтения символов. 2. Понизили порог для нахождения автомобильного номера в кадре для максимально результативного нахождения рамки номера. При данном решении также повышаются ложные детекции, которые отсеиваются на этапе чтения символов. 3. Добавили логику для поиска среднего номера, основанного не на массиве, как ранее, а на словаре для более быстрой обработке. Вмещает больше данных о прочитанном номере. Анализ словаря позволяет сформировать средний номер, а также проанализировать вероятность правильного прочтения рамки. Основываясь на этой логике формируется статус прочитанного номера при отправке в систему обмена сообщениями (номер распознан полностью / частично / распознан). 4. Добавили разбиение номера на основную часть и регион. Данные составляющие анализируются отдельно, так как большая ошибка на тесте возникает в части региона. Также регион имеет меньший по размеру словарь. 5. Изменили логику по закрытию парковочной сессии. Теперь закрытие осуществляется при потере авто из кадра.
Новость
Реализовано: 29 октября 2021
Результаты тестирования на данном этапе. Поиск рамки номера: 468/558 (83,8%). Чтение символов: 398/468 (85,04%)
Новость
Реализовано: 16 октября 2021
Разработали версию распознавателя – 0.2. Основная идея версии – повышение качества распознавания символов гос. номера. Что мы провели? 1. Внедрили взаимодействие с системой обмена сообщениями для отправки событий о парковке и фото припаркованного авто. 2. Внедрили улучшенную версию нейросети №1 для распознавания автомобильного номера (добавлено решение проекта с открытым исходным кодом). 3. Внедрили технологии автоматического анализа текста для преобразования изображения в текст. Это необходимо для чтения символов автомобильного номера (добавлено решение проекта с открытым исходным кодом). 4. Добавлено изменения ротации и проекции номера для повышения качества распознавания (добавлено решение проекта с открытым исходным кодом).
Новость
Реализовано: 22 сентября 2021
Результаты тестирования на данном этапе. Поиск рамки номера: 464/558 (83,7%) – результат вырос с 40-50%! Чтение символов: 256/464 (55,17%)
Новость
Реализовано: 11 сентября 2021
Готова версия 0.1 распознавателя, определяющая основную логику работы распознавателя. Что в этой версии? 1. Внедрили нейросеть №1 для распознавания авто. 2. Затем внедрили нейросеть №2 для трекинга авто, найденного с помощью нейросети №1. Используется для отслеживания факта парковки авто и его отъезд с места парковки. 3. Внедрили нейросеть №3 для поиска рамки номера в кадре авто. 4. Внедрили нейросеть №4 для чтения символов найденного ГРН. 5. Добавили разметку зоны парковки. При попадании авто в зону парковки и его остановке, начинается парковочная сессия.
Новость
Реализовано: 23 января 2021
Нам нравятся результаты, которые наблюдаем. Было принято правильное решение – разрабатывать детектор своими силами.
Новость
Реализовано: 11 января 2021
Решение принято: разрабатываем свой детектор и пересматриваем оборудование.
Новость
Реализовано: 8 января 2021
Доработка текущего детектора требует привлечение дополнительных специалистов, длительного времени и соответственно дополнительных трат – это противоречит нашей концепции. Мы хотим отстроиться от конкурентов и создать более доступное цифровое решение. Будем искать другие варианты.
- Всего: 13232