
Описание проекта
Зацепное устройство представляет собой программно управляемый выдвигающийся пин (штырь), расположенный на тягаче (автоматической транспортной платформе), посредством которого осуществляется зацепление буксируемой тележки. Устройство предназначено для системы: автоматический тягач (AGV) – буксируемая тележка с грузом. Автоматический тягач перемещается по заданной траектории, буксируя за собой тележку с грузом. В заданных точках тележка зацепляется/отцепляется от тягача.
Цель проекта: разработка и внедрение зацепного устройства для автоматических транспортных платформ (AGV), повышающего эффективность и точность зацепления буксируемых тележек.
Задачи проекта:
- создать программно-управляемое зацепное устройство для точного контроля зацепления и отцепления;
- интегрировать устройство с мобильной транспортной платформой (AGV), обеспечив совместимость и управление через микроконтроллер;
- оптимизировать энергопотребление и двигательные системы для повышения эффективности;
- провести тестирование безопасности и эффективности, оптимизировать производственные процессы;
- реализовать маркетинговые стратегии для продвижения продукта и привлечения заказчиков;
- установить партнерские отношения с производителями AGV систем и сотрудничество с поставщиками материалов;
- реализовать проект в лаборатории Тольяттинского государственного университета, оптимизировав бюджет и ресурсы.
Ожидаемые результаты:
- разработка программно-управляемого зацепного устройства для AGV;
- интеграция с AGV, оптимизация энергопотребления и систем;
- успешное тестирование, сертификация безопасности;
- оптимизированные производственные процессы, маркетинговая стратегия;
- установление партнерских отношений;
- реализация в учебной лаборатории.
Потребительские сегменты: промышленные производства, автомобильные заводы, складские хозяйства, технологические парки и производители AGV систем.
Доходы бизнеса: продажи зацепных устройств: главный источник дохода; услуги технической поддержки: дополнительные доходы через предоставление расширенных услуг.
Проект соответствует рынку Технет, поскольку направлен на автоматизацию и оптимизацию логистических процессов на промышленных предприятиях, что является ключевым аспектом цифровой трансформации.
Проект ориентирован на повышение эффективности промышленных предприятий через внедрение автоматизированных транспортных систем. Это способствует росту конкурентоспособности и развитию промышленных предприятий в регионе.
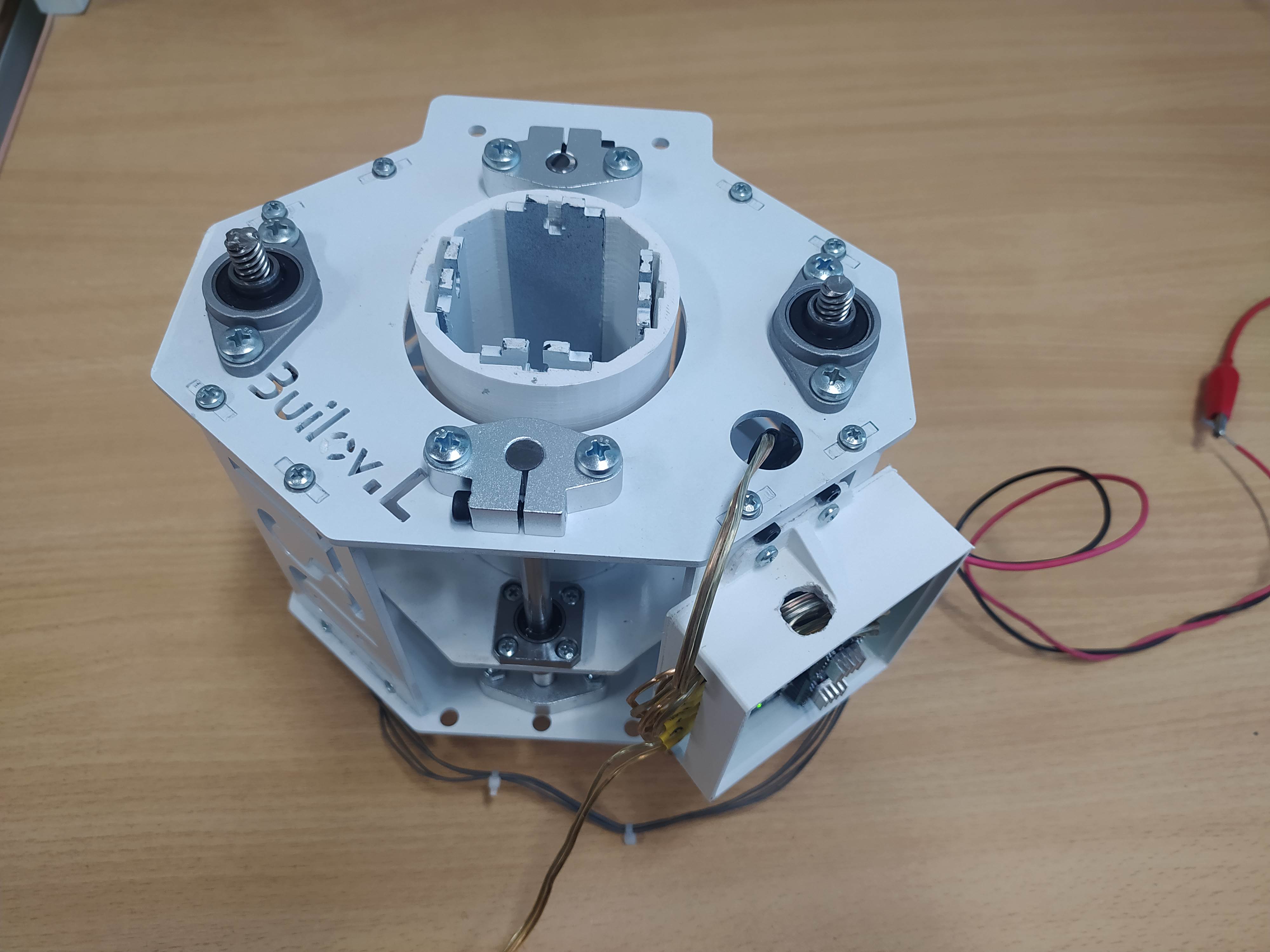
Данный проект c уровня TRL-2 перешел на уровень TRL-3. Разработаны чертежи устройства, продумана кинематика и модули для обеспечения динамической работы приводов устройства. Продумана система питания и модуль управления для осущетвления функций зацепа.
Проект достиг уровня готовности TRL-3, что подразумевает переход от теоретической концепции к более конкретному и проработанному уровню. В данном случае:
- Разработаны детальные чертежи устройства, что указывает на более конкретное представление о его конструкции. Кинематика, или принцип движения и взаимодействия компонентов, продумана, что важно для обеспечения эффективной работы приводов.
- Модули, необходимые для обеспечения динамической работы приводов устройства, разработаны. Это включает в себя компоненты, отвечающие за движение, управление и контроль зацепного устройства в реальном времени.
- Продумана система питания, что означает определение требований к энергоснабжению устройства. Также разработан модуль управления, который предоставляет возможность осуществления функций зацепа. Это является ключевым шагом к практической реализации продукта.
Достижение уровня TRL-3 подтверждает, что проект перешел к стадии более глубокой разработки, подготавливая основу для следующих этапов, таких как создание прототипа и тестирование.