
Описание проекта
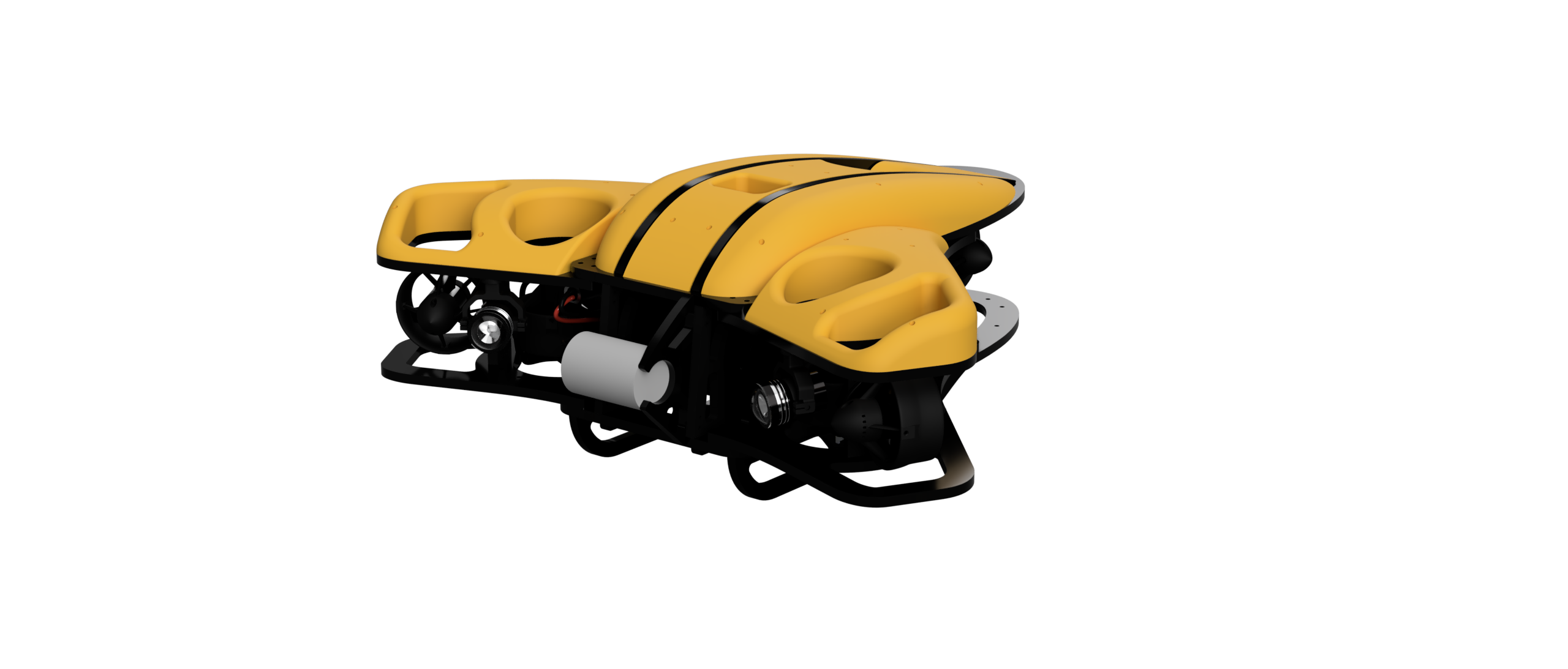
Проект заключается в разработке высокоманевренного телеуправляемого подводного аппарата осмотрового класса с применением уникальной компоновки. Уникальность разработки заключается в применении Y-компоновки, суть которой заключатся в размещении движителей по трём осям, отстоящим друг от друга под углом 120 градусов. Данная компоновка позволяет достичь управляемости по всем шести пространственным степеням свободы при использовании только 6 движителей. Любая другая компоновка потребует для такой управляемости минимум 8 движителей. Это позволяет сэкономить на движителях, сохраняя высокую маневренность. Недостаток такой компоновки - снижение скорости по сравнению с восьмидвижительными аппаратами. Однако для телеуправляемых аппаратов нет жестких ограничений на скорость, тогда как маневровые качества могут оказаться ключевыми при осмотре гидротехнических сооружений, затонувших объектов и иных объектов со сложной геометрией и внутренними пространствами.
На данный момент разработки создается прототип и уже получен патент на полезную модель.