
Описание проекта
Актуальность: в современном мире одной из главных задач робототехники является замена человека роботом для работ на объектах повышенной опасности. Одним из таких объектов может быть пожар здания.
Могут возникнуть ситуации, когда управление роботом с помощью видеокамер невозможно, например, из-за низкой скорости передачи изображения. В таком случае на помощь приходит управление с помощью симуляции. Передача данных местоположения с датчиков не требует большой скорости. Следовательно, зная карту местности и подавая данные с датчиков в симуляцию, возможно реализовать удаленное управление роботом.
Например, в случае пожара, в задымленном помещении человек не может управлять роботом с помощью видеокамер. Однако если имеется карта помещения и известно местоположение робота, то оператор может удаленно управлять роботом с помощью цифрового двойника.
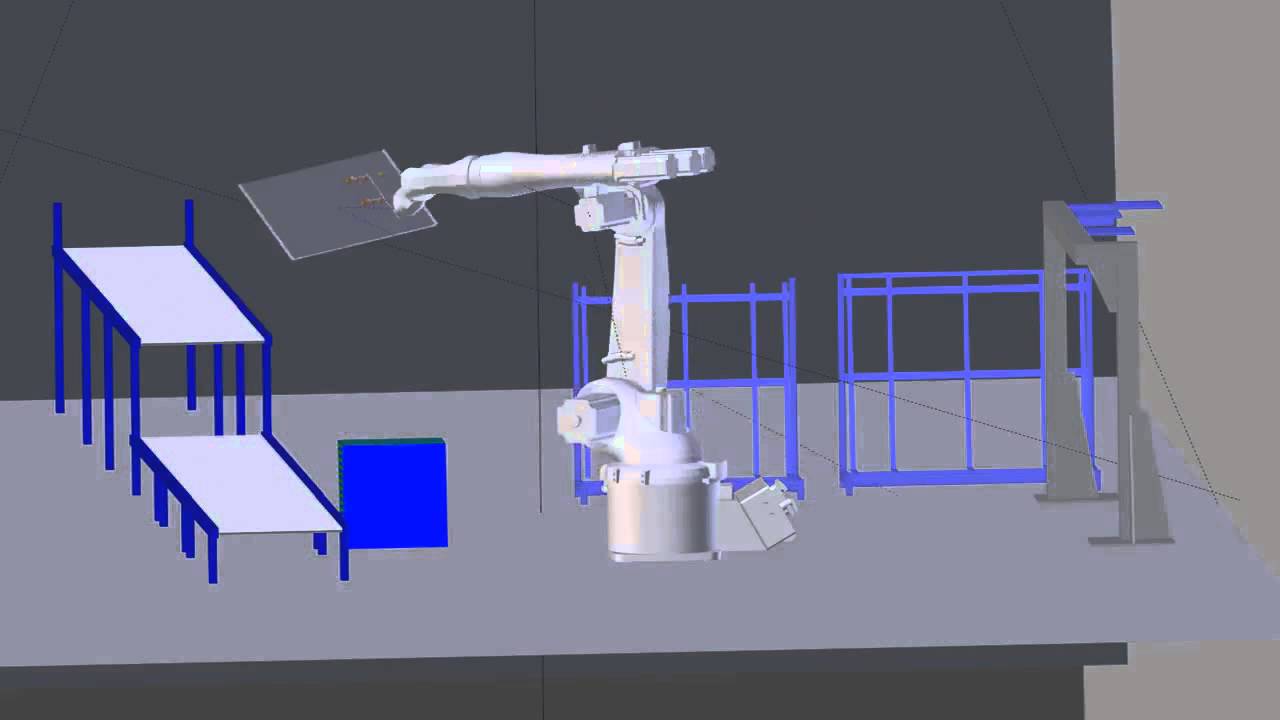
Цель: создание программно-аппаратного комплекса для решения задач управления роботом-манипулятором. Программно-аппаратный комплекс включает в себя роботизированную платформу и ее цифрового двойника. Аппаратная составляющая роботизированной платформы состоит из подсистемы колесной платформы и подсистемы манипулятора.
Задачи:
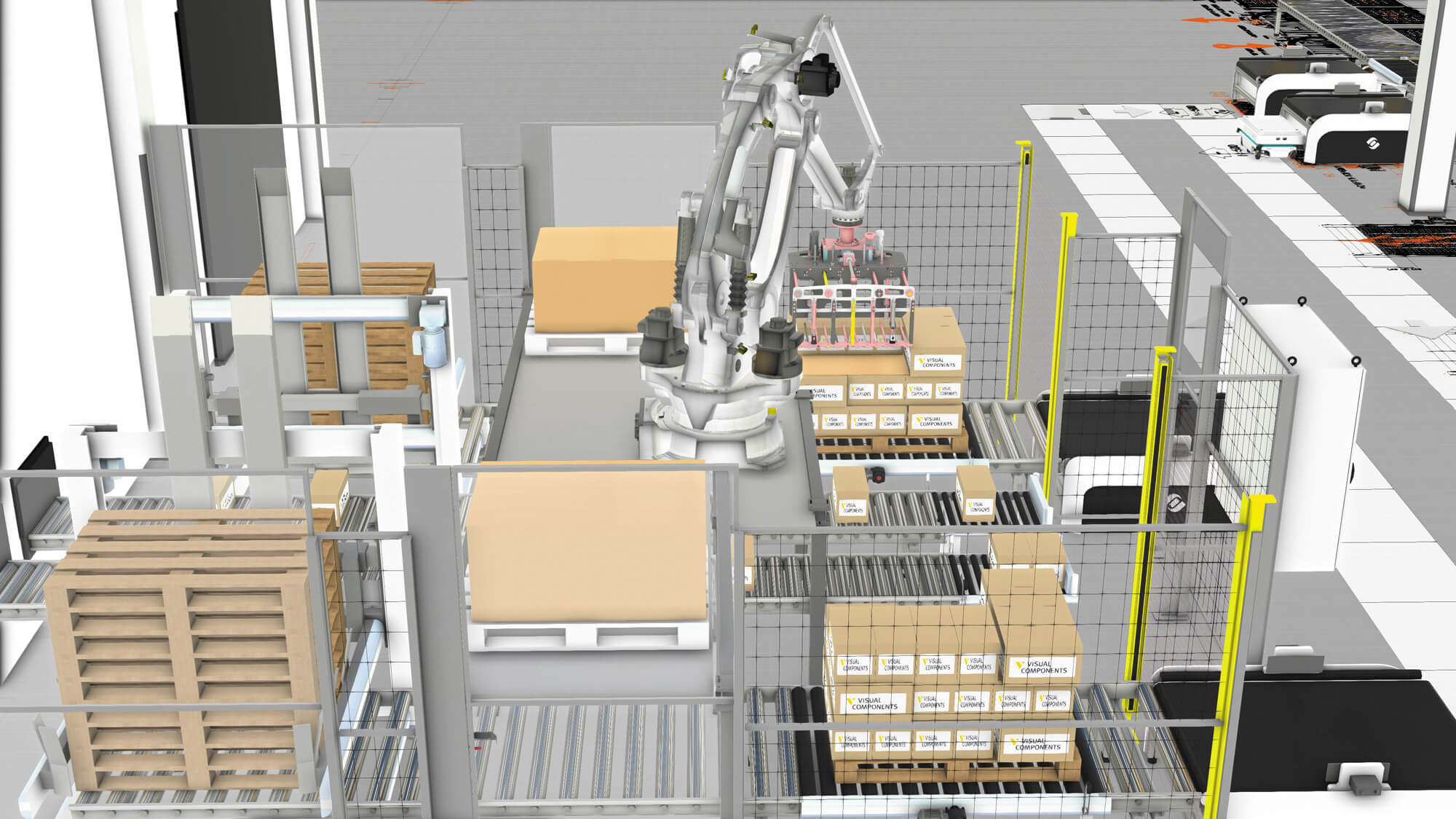
- Создание карты местности в симуляции.
- Создание робота-манипулятора в симуляции.
- Проведение тестов в симуляции по перемещению объектов.
- Подключение реального робота к цифровому двойнику.
- Апробация решения на реальном объекте.
Направленность: программно-аппаратный комплекс предназначен для решения задач, связанных с удаленным управлением роботом в условиях, когда известна карта местности и координаты робота, но, по каким-либо причинам, отсутствует возможность управлять роботом с помощью видеокамер.
Целевая аудитория: компании, работающие на объектах повышенной опасности.
Презентации
Пульс
Достижения
Команда
Контакты
Следят за проектом
