
Описание проекта
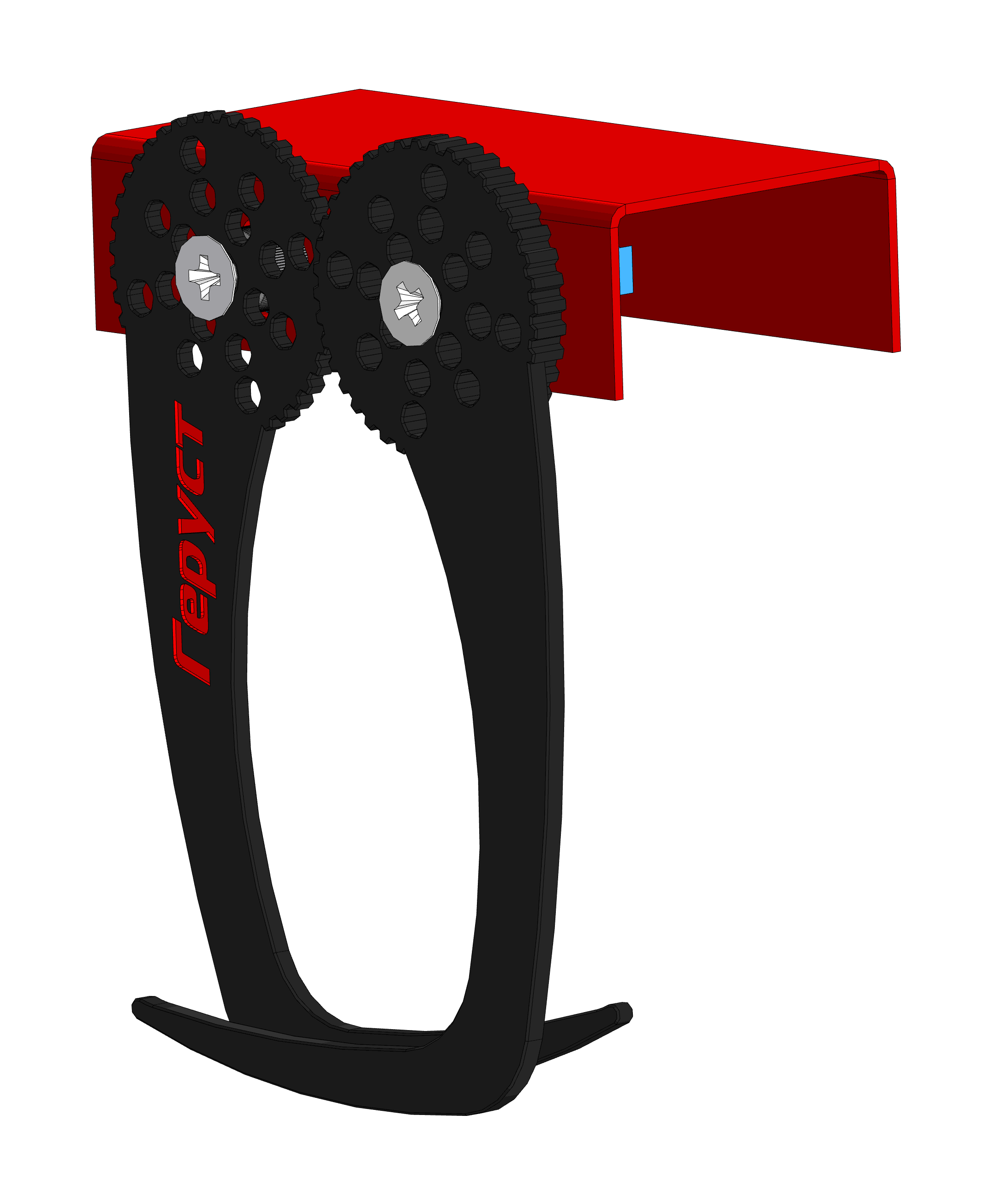
Цель проекта заключается в разработке руки-клешни и создании рабочего образца (далее Система захвата), которая позволит беспилотным летательным аппаратам (БПЛА) захватывать, сбрасывать и отпускать перевозимые грузы без непосредственного участия оператора или человека, ответственного за крепление груза.
Задачи проекта:
1. Проектирование и разработка механической системы захвата: Определение требований к руке-клешне, таким как грузоподъемность, размеры, устойчивость и надежность. Проектирование механизмов захвата, управления и передачи движения. Разработка прототипа руки-клешни с учетом аэродинамических и весовых характеристик БПЛА.
2. Создание рабочего образца: сборка, подгонка деталей.
3. Интеграция с БПЛА: Разработка интерфейса для интеграции руки-клешни с системой управления БПЛА. Тестирование и оптимизация взаимодействия между рукой-клешней и БПЛА.
4. Автоматизация и управление:Разработка алгоритмов автоматического захвата и отпускания грузов. Интеграция датчиков для обнаружения и контроля положения груза. Создание системы управления руки-клешни, которая может работать автономно или под управлением оператора.
5. Тестирование и безопасность: Проведение испытаний прототипа руки-клешни в различных условиях (например, ветер, вибрации, температура). Обеспечение безопасности при работе с рукой-клешней, чтобы избежать повреждения грузов или БПЛА.