
Описание проекта
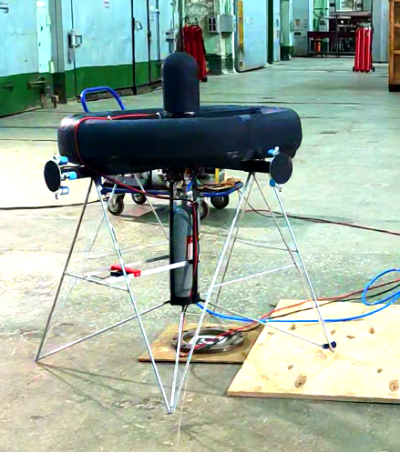
В состав программно-аппаратного комплекса входит блок инерциальных МЭМС акселерометров и гироскопов, видеокамера, лазерный высотомер, вычислительные устройства на микроконтроллере STM32 и микрокомпьютере Jetson Nano, геометрические маркеры, макет БПЛА с двухвинтовым маршевым электродвигателем и пневматическими двигателями коррекции с баллоном на сжатом газе, модуль радиолокационного определения координат, псевдоспутниковая система коррекции. В режиме свободного полета реализовано следующее полетное задание: подъем БПЛА, поиск маркера, формирование управления для движения БПЛА в сторону маркера и посадка на маркер. В качестве информационной системы использована бесплатформенная инерциальная навигационная система на МЭМС-датчиках, корректируемая по данным от системы технического зрения, лазерного высотомера, радиолокационного модуля, псевдоспутниковой системы коррекции.
Презентации
Пульс
Новость
Выполнена корректировка презентации проекта
Презентация по Системе управления и навигации для точной посадки БАС v2.pdfНовость
Защита проекта "Система управления и навигации для точной вертикальной посадки БАС"
Презентация по Системе управления и навигации для точной посадки БАС.pdfНовость
Дорожная карта по проекту "Система управления и навигации для точной вертикальной посадки БАС"
Дорожная карта по Системе управления и навигации для точной посадки БАС.xlsxНовость
Видеоролик с докладом по проекту "Система управления и навигации для точной посадки БАС"
https://ncld.susu.ru/s/FqqbrGTBF4Y6BgYДостижения
Проходит акселерацию
Команда

Контакты
Следят за проектом



