
Описание проекта
В силу того, что задача подводной навигации до сих пор не решена так же удобно, как над водой: сигналы GNSS или GPS под воду не проникают, а все существующие инерциальные системы либо недостаточно для этого точны, либо чрезмерно дороги необходимо создать такое устройство, позволяющее выполнять мониторинг геолокации под водой, которое будет одновременно точным, простым в использовании и сравнительно недорогим.
Система должна работать посредством преобразования спутникового сигнала в ультразвук. Для этого необходимо 2 компонента устройства – передатчик сигнала и приемник сигнала. Передатчик сигнала должен иметь двойной функционал – получать сигнал от спутника GPS или ГЛОНАСС и в тоже время преобразовывать полученный сигнал и отправлять его на приемник. Функции приемника – получить зашифрованный сигнал, вычислить местоположение относительно полученных данных и вывести местоположение пользователя на экран.
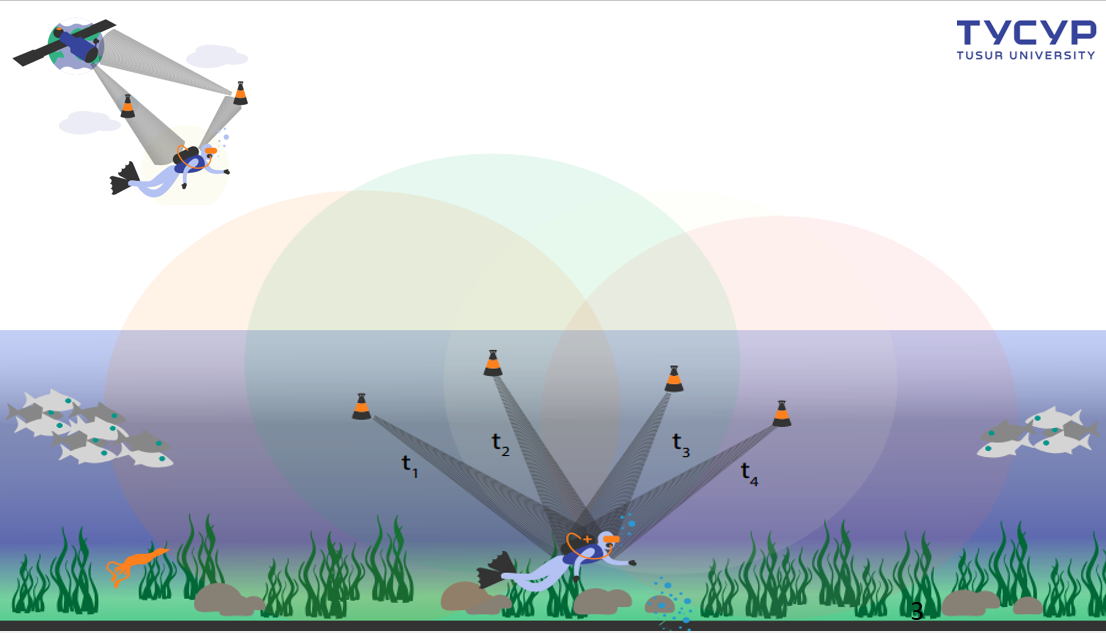
В общих чертах, система состоит из четырёх плавучих буев-ретрансляторов GNSS-сигнала, которые ставятся на якоря, и любого числа подводных навигационных приемников (пользовательских интерфейсов).
Навигационный приемник в прототипе акустически пассивен — он никогда не излучает (только так можно обеспечить работу неограниченного числа акустических приемников в одной акватории), приемник «слушает» буи, принимает их сообщения и решает задачу нахождения собственного положения на основе географических координат буев. К географическим координатам добавляем расчёт глубины – и можно получить данные нахождения самого приемника.
