

Описание проекта
Исследование, освоение и эксплуатация ресурсов Мирового океана на протяжении всего времени остается актуальной задачей. С ростом активности в морской среде возрастает необходимость в разработке эффективных методов для анализа и классификации подводных объектов. Эти методы применяются для обеспечения безопасности критически важных объектов, проведения научных исследований океана и поддержания контроля над морскими территориями. Здесь можно выделить 3 основных проблемы, требующих решения при создании систем подводной навигации.
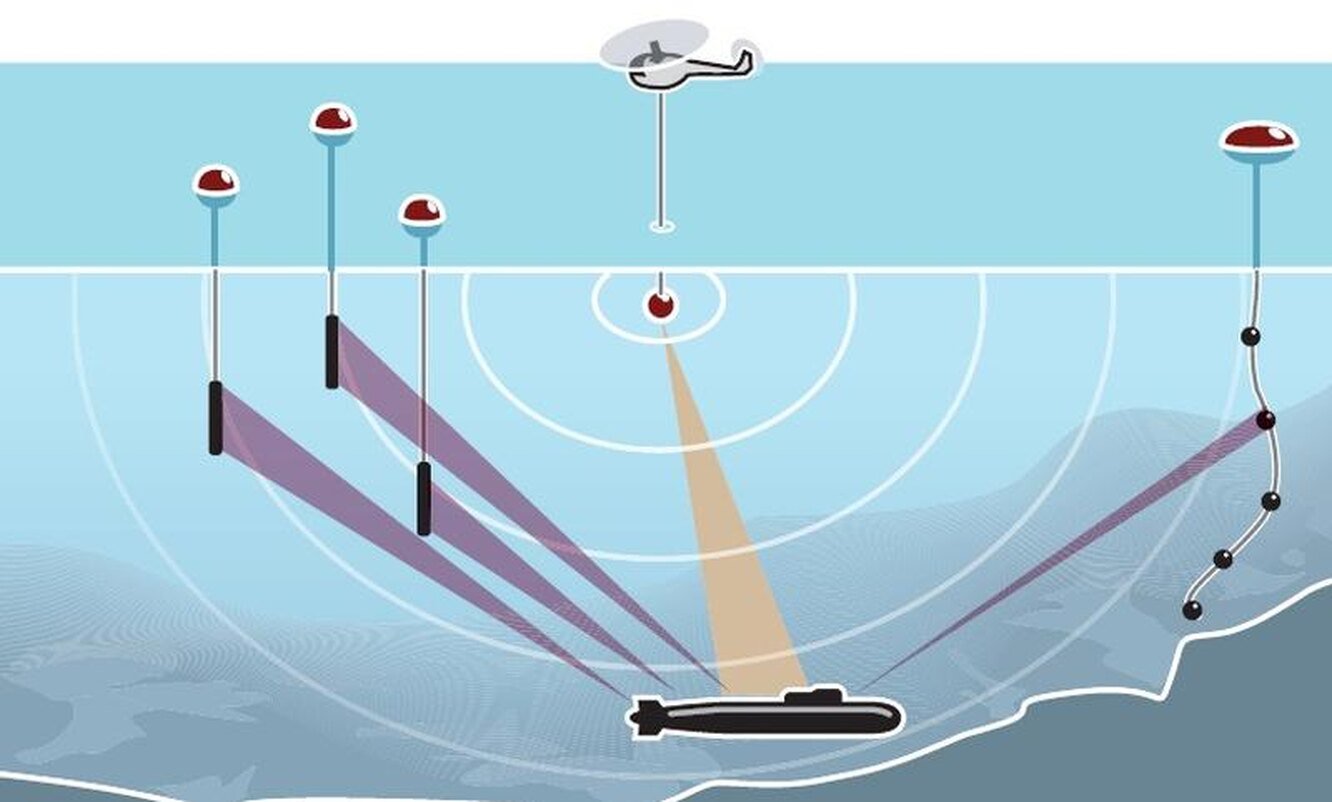
1. Обнаружение объектов. Обнаружение объектов является основной задачей охраны акваторий. Задача обнаружения играет ключевую роль в процессе обработки сигналов, зарегистрированных пассивным сонаром. Важными требованиями при этом являются: обработка сигналов в реальном времени, повышение быстродействия и точности обнаружения.
Для обнаружения используется факт, что по мере приближения объекта к сонару, амплитуда сигнала увеличивается, что указывает на наличие объекта-нарушителя. Частотные свойства регистрируемого сигнала так же меняются, они отражают свойства объекта-нарушителя, таким образом, обнаружение объекта может быть выполнено на основе создаваемых им шумов. Сонар регистрирует сигнал, который является совокупностью шума, помех и полезного сигнала, генерируемого вторгшимся объектом. Исследуемые объекты при движении генерируют сигнал в более низкочастотном диапазоне.
Обнаружение объекта может быть осуществлено по увеличению интенсивности сигнала (мощности). Основной проблемой является то, что потери мощности сигнала в высокочастотном диапазоне существенно увеличиваются с увеличением расстояния. Отсюда можно сделать вывод, что можно увеличить дальность приема системы без изменения частотных характеристик, лишь увеличивая мощность излучаемого сигнала, а это, в свою очередь, ограничивается свойствами применяемой аппаратуры.
Решить проблемы увеличения дальности приема и увеличения мощности сигнала в широком частотном диапазоне можно за счет подходов к обработке сигнала. Классическим методом анализа динамических объектов является преобразование Фурье, а в качестве характеристики используется спектр мощности. Однако этом этому преобразованию присущи такие недостатки, как большая трудоемкость и низкое разрешение при коротких выборках. Альтернативой преобразования Фурье являются параметрические методы спектрального анализа на основе авторегрессионной модели (Прони, Писаренко и тд.), но они являются еще более трудоемкими, хотя и позволяют производить спектральный анализ по коротким реализациям.
В задачах обнаружения и распознавания необходимо сформировать диагностические признаки, обладающие следующими свойствами:
– признаки должны иметь физическую интерпретацию, описывать определенные свойства сигнала;
– признаки должны быть устойчивыми (не должны сильно изменяться при незначительном изменении свойств сигнала);
– признаки должны быть легко вычисляемыми, допускающими оценивание в темпе эксперимента
Первым двум требованиям, безусловно, отвечают спектральные характеристики сигнала. В спектре, как правило, выделяются устойчивые узкополосные резонансы. Количество этих резонансов, их частоты и мощности позволяют сформировать первичные диагностические признаки. Разные распознаваемые объекты будут иметь разные спектры, следовательно, и разные диагностические признаки. Для одного и того же объекта возможно смещение частот резонансов, изменение их мощности и количества в процессе его перемещения относительно сейсмического приемника.
В этой классической процедуре диагностики кроме высокой трудоемкости спектрального анализа существует еще и трудность выделения истинных резонансов, маскируемых боковыми частотами, обусловленными «утечкой» в спектральной полосе. Избежать этого позволяет применение параметрических способов, четко выделяющих колебательные составляющие. Но их точность очень зависит от достаточно субъективного выбора порядка модели, а трудоемкость еще выше, чем в классических алгоритмах.
Предлагаемый в данном проекте выход из создавшейся ситуации – экспресс-оценивание спектральных характеристик на основе экстремальной фильтрации. Хотя в этом методе выделяются субполосные составляющие (т.е. не разделяются близкие гармоники), он является достаточно эффективным, простым, нетрудоемким способом спектрального оценивания, а параметры выделенных знакопеременных составляющих позволяют сформировать диагностические признаки, отвечающие всем сформулированным требованиям.
3. Осуществление подводной навигации. Невозможно представить нашу жизнь без систем спутниковой навигации. Любой современный гаджет может узнать свое местоположение с точностью до пары метров. И при этом всегда, такие системы не охватывают примерно 71% территории планеты, находящуюся под водой.
В связи с этим можно считать, что задача подводной навигации до сих пор не решена так же удобно, как над водой: сигналы GNSS под воду не проникают, а существующие инерциальные системы либо недостаточно для этого точны, либо чрезмерно дороги (системы HiPAP, производитель Kongsberg, Норвегия; GAPS, производитель IXBLUE, Франция; Германия; Teledyne, Tritech MicronNAV США и т.д.). При этом, помимо высокой стоимости их отличает небольшой охват территории и достаточно узкая специализация (например, предназначенные для работы водолазов, которые обеспечивают только выхода к маяку без указания его координат и без возможности выхода на произвольные координаты акватории).
Помимо сказанного, навигация под водой предполагает ориентирование в трехмерном пространстве. А погрешность измерения глубины с помощью датчиков давления или эхолотов возрастает с каждым километром.
Системы подводной навигации делятся по относительной длине измерительной базы, которая оценивается по траектории позиционируемого объекта. На короткой базе точность позиционирования теряется. Предлагаемая к разработке система идентификации гидроакустических сигналов для подводной навигации предполагает наличие методов обработки, которые позволят добиться требуемой точности даже при использовании в короткобазисных или ультра короткобазисных системах.
Презентации
Пульс
Обновление продукта
расширение функциональности и понимание значимости продукта
Публичное выступление
Выступление на Экспертной трубе
Инициация идеи и проекта
НАчало работы над проектам, сформулирована Целевая аудитория проекта