
Описание проекта
В ходе операций на позвоночнике существует необходимость проникновения инструмента хирурга в позвоночный канал. В основном это осуществляется при помощи кусачек-бокорезов, которыми являются кусачки Керрисона. Размеры рабочей части у этого инструмента одни из самых маленьких от 1 мм до 6 мм. При этом сами кусачки массивные, и хирург вынужден совмещать значительные усилия при выкусывании костей с микроскопическими движениями кончика инструмента в ране. Учитывая значительную продолжительность хирургического вмешательства до нескольких часов. Количество циклов выкусываний Керрисонами доходит до нескольких сотен движений. Даже один срыв кончика инструмента с кости на несколько миллиметров в условиях работы рядом со спинным мозгом и корешками может привести к травме нервных структур и последующей инвалидизации пациента. Для снижения неконтролируемых движений кусачек хирурги зачастую держат кусачки двумя руками, что уменьшает возможности врача по действиям в ране (например: левой рукой можно выполнять дополнительные действия по аспирации крови из операционного поля или установки инструмента по защите содержимого позвоночного канала). Это приводит к увеличению времени хирургического вмешательства.
После доступа к нервным структурам нейрохирургам необходимо выполнять основной этап операции, в ходе которого руки выполняют микродвижения под микроскопом. После нагрузок, претерпеваемых при работе кусачками, из-за усталости мышц рук хирурга значительно усложняется процесс перехода к точным, филигранным действиям на нервных структурах.
В рамках стартап-проекта будет разработан модифицированный костный выкусыватель Керрисона с электроавтоматической частью:
1. Инструмент будет оснащен стандартной для данного типа хирургических кусачек рабочей частью: удлиненная металлическая конструкция, состоящая из двух частей (губок), одна из которых имеет возможность осуществлять возвратно-поступательные движения относительно другой. Конец подвижной губки оснащается острой режущей кромкой, конец неподвижной губки - выступающей мини-платформой. При приведении инструмента в конечное (сжатое) положение происходит зажатие и последующее откусывание костного материала, находящегося в рабочей зоне.
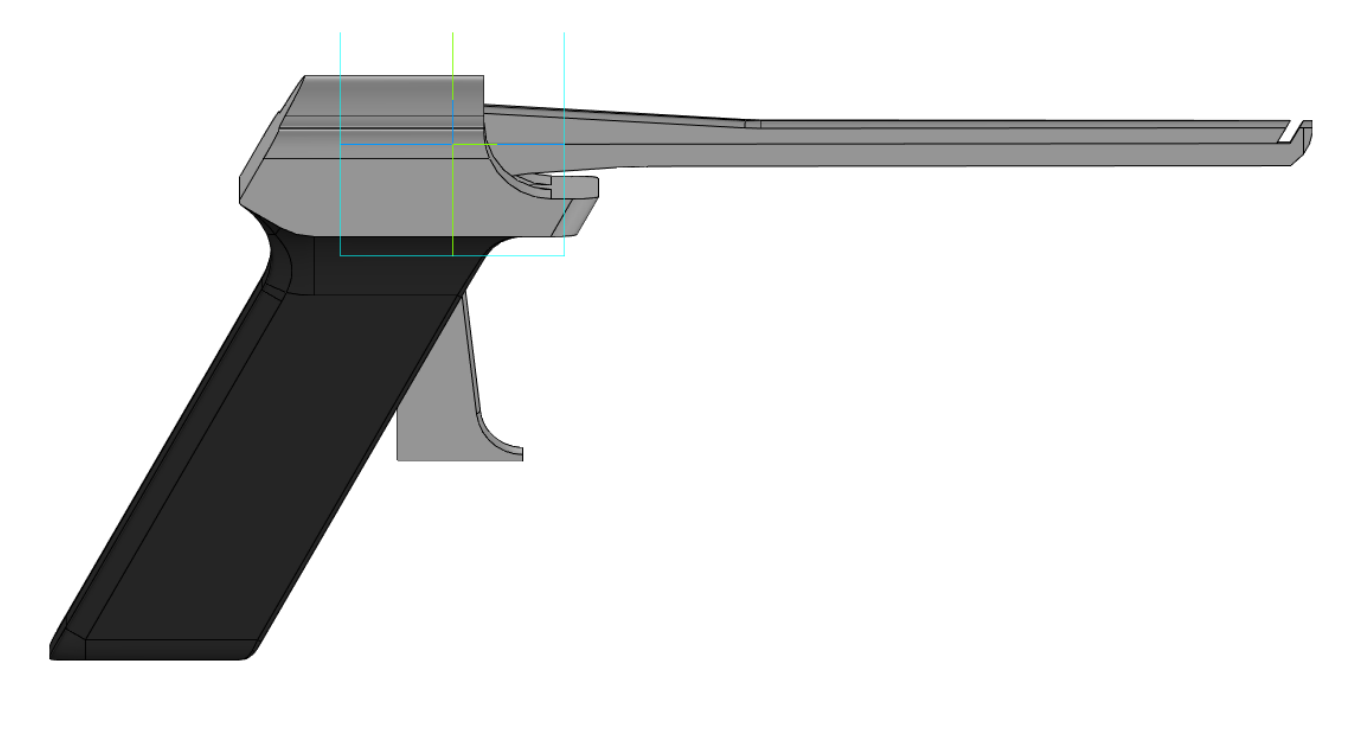
2. Вместо стандартных парных рукоятей, инструмент будет иметь монорукоять, внутрь которой будет помещен электропривод. Управление движением инструмента будет осуществляться за счет триггерного механизма: смещение рабочей части выкусывателя пропорционально мере нажатия на триггерный крюк. Провод питания прибора будет отводиться из нижней части рукояти и вести к прилагающемуся блоку электронной логики и питания.