

Описание проекта
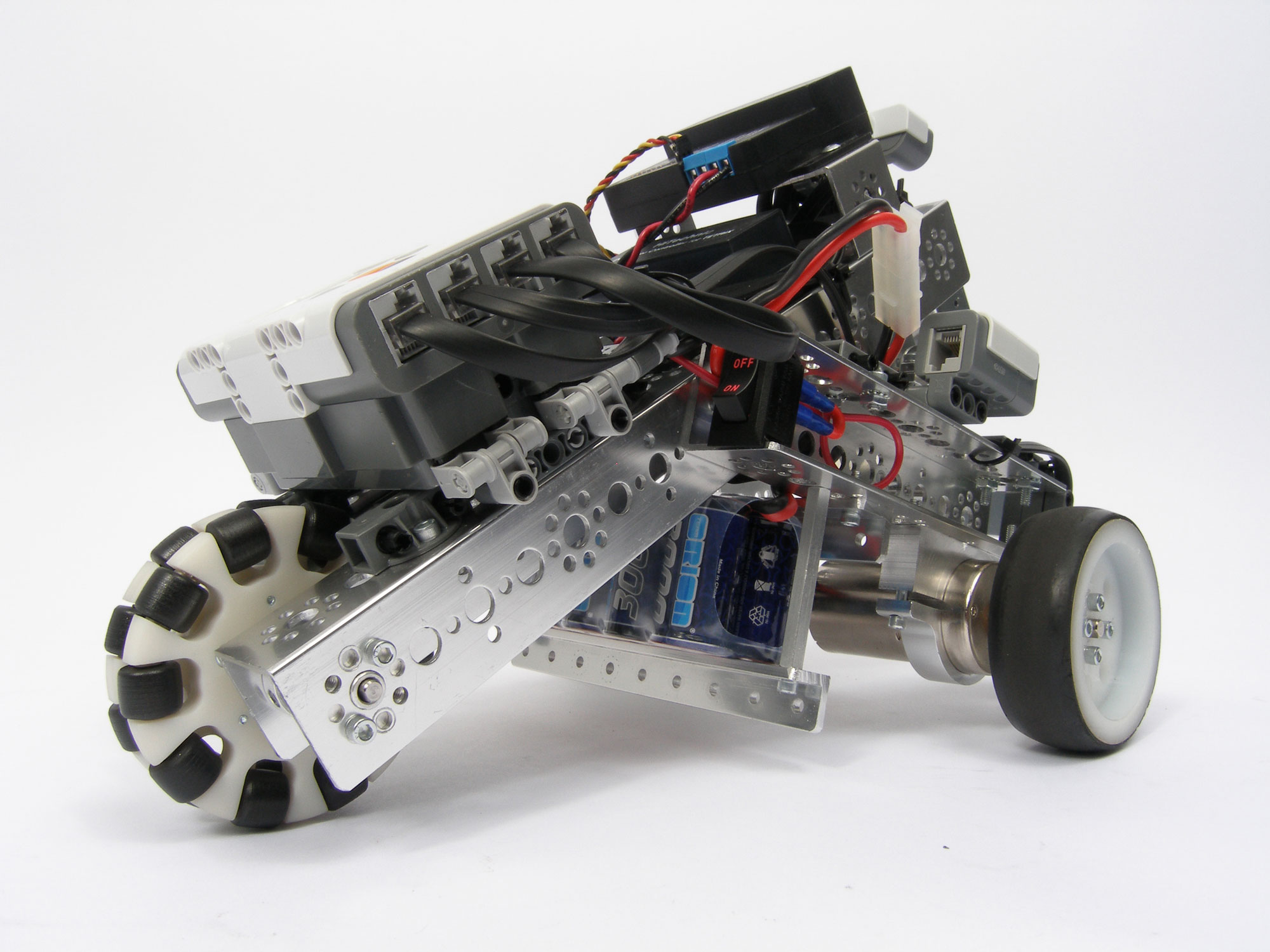
Разработка трёхколёсной роботехнической платформы с автоматическим управлением
Презентации
Пульс
реализовано
Запуск прототипа
Добрый день. Сегодня хочу рассказать о изменениях в проекте, а конкретнее, что уже было реализовано и какие дальнейшие планы. На сегодняшний день, доделана прямая и обратная кинематика робота, используя которую, модель может самостоятельно выполнять ряд действий в декартовой системе координат. Так же, был реализован алгоритм поиска пути, в заданной матрице поля (Весь маршрут движения задается в ней) В дальнейшем планируется, создание более удобного интерфейса редактирования карты, добавления манипулятора и машинного зрения, для распознавания конкретных объектов.