
Описание проекта
Строительные объекты, использующие тросы, требуют своевременного осмотра. На данный момент существует несколько проблем: обнаружение признаков износа троса; обеспечение простоты и эффективности в мониторинге состоянии троса.
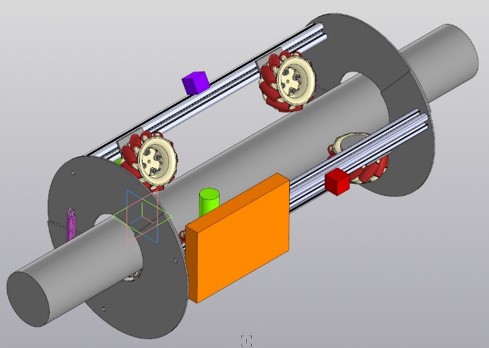
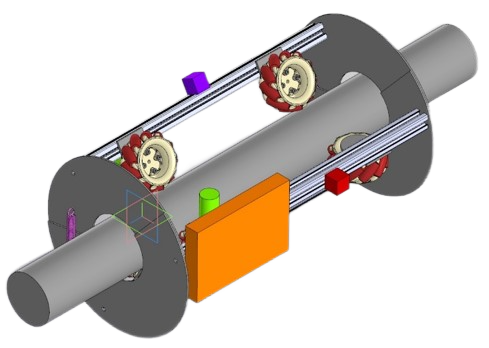
Цель проекта: разработка мобильного робота для мониторинга состояния тросов строительных объектов. Для достижения этой цели предполагается выполнить следующие задачи:
1. Разработать прототип устройства для перемещения по тросам различного диаметра и
расположенных под разным углом;
2. Разработать программное обеспечение для полноценного функционирования
прототипа.
Этот автономный робот оснащен датчиками и камерами высокого разрешения, которые позволяют ему проводить точный анализ состояния тросов и обнаруживать любые повреждения или износ. Благодаря своей мобильности, робот может передвигаться по различным тросам и выполнять мониторинг в реальном времени, что позволяет оперативно реагировать на любые изменения и предотвращать возможные аварийные ситуации. Он может работать в различных условиях, что позволяет использовать его на строительных площадках. Робот также оснащен системой сбора и анализа данных, которая позволяет ему предоставлять подробные отчеты о состоянии тросов и их износе. Эта информация может быть использована для планирования ремонтных работ и продления срока службы тросов.
Потенциальные потребители: юридические лица и государственные учреждения, эксплуатирующие строительные сооружения с тросами.