

Описание проекта
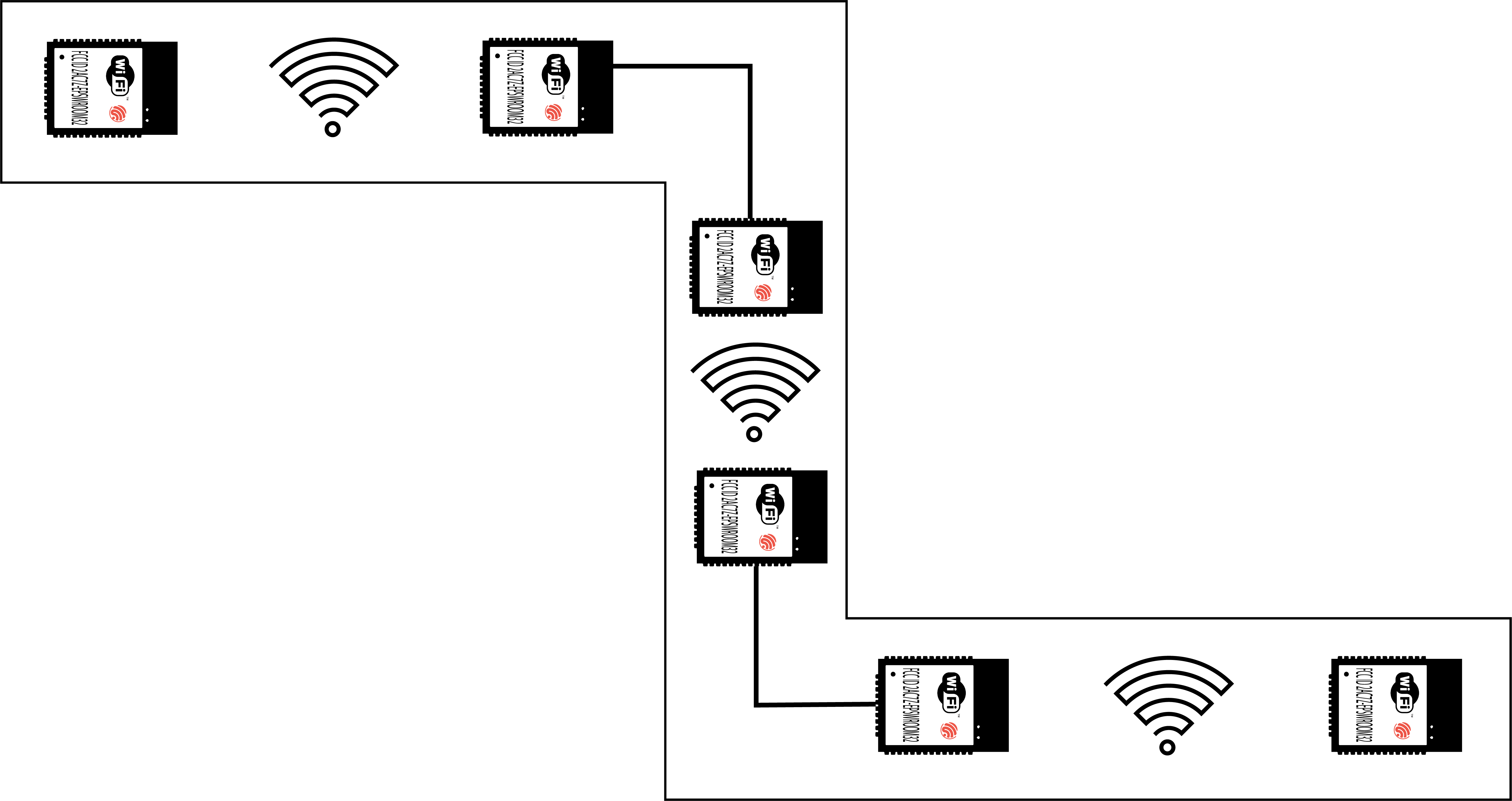
В настоящее время горнопроходческие и горноразведовательные работы проводятся с помощью автономных роботов. Управление происходит по информационному кабелю, который часто выходит из строя в процессе проведения горнопроходческих работ, что вызывает остановку в работе и требует ремонта в труднодоступных местах под землей. Использование книппельной самоорганизующейся сети позволит обеспечить беспроводную устойчивую связь с необходимой скоростью передачи данных для управления автономным роботом в труднодоступных условиях с необходимой автономностью.
#инвестиционно_привлекательный
Презентации
Пульс
Пока еще в пульсе нет записей
Достижения
Проект посетивший Архипелаг 2023
