
Описание проекта
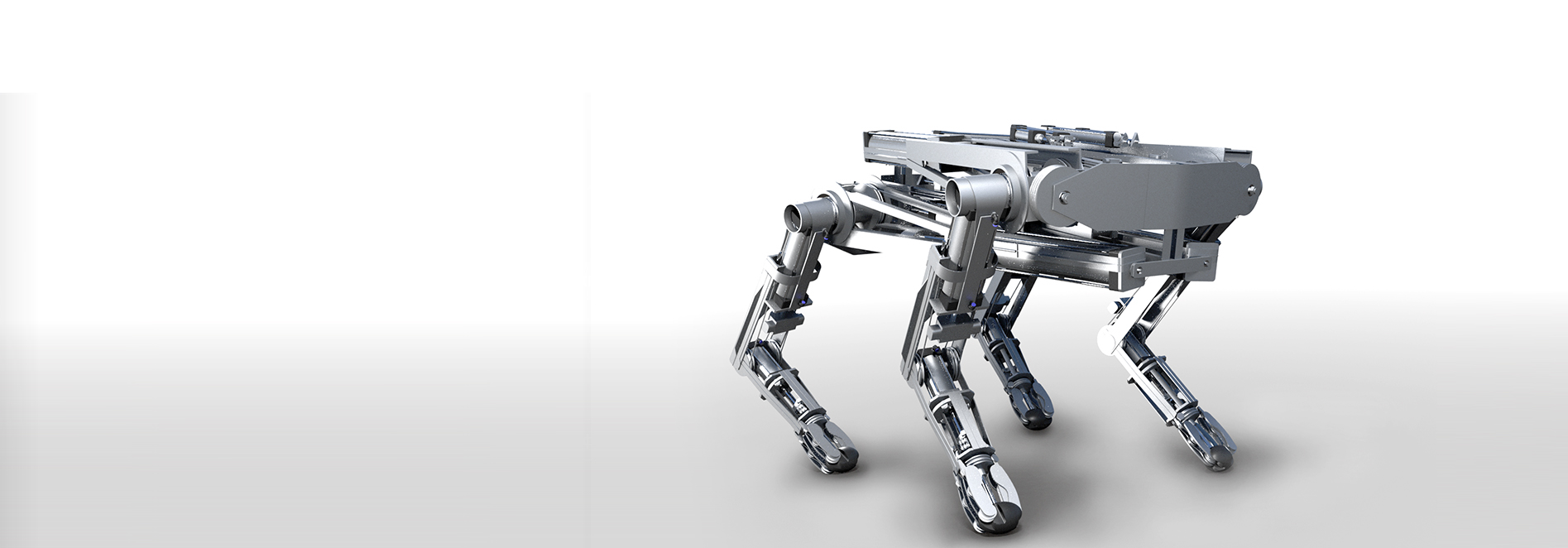
Мы разрабатываем наземный беспилотник — многофункциональную шагающую роботизированную платформу на пневматическом приводе, обладающую большой автономностью, способную эффективно перемещаться по неровной местности и сложным покрытиям (песок, глина, снежные сугробы, бетонные завалы и т. д.), где традиционные колесные и гусеничные системы оказываются неприменимыми.
Основой проекта является разработка уникального пневматического привода, который позволяет увеличить автономность, грузоподъёмность, мощность и доступность шагающей транспортной платформы по сравнению с традиционными электрическими и гидравлическими аналогами.
Электрические аккумуляторы, как основной источник энергии для движения шагающей платформы на электроприводах, обеспечивают в десятки раз меньшую автономность, чем силовая установка на основе двигателя внутреннего сгорания, кроме того, при низких температурах аккумуляторы быстро утрачивают работоспособность. А гидравлические системы, по сравнению с пневматическими, обладают в разы более высокой стоимостью.
Таким образом, шагающий робот может быть применен для выполнения автономных и телеуправляемых миссий, связанных с мониторингом, сбором данных и переносом грузов. Немаловажной особенностью шагающей платформы с пневматическим приводом является возможность её эксплуатации в климатических условиях и территориальных масштабах Российской Федерации.
Перспективы применения
- СТРОИТЕЛЬСТВО И МОНТАЖ — удалённая инспекция выполнения строительно-монтажных работ, автономное сопровождение человека-оператора;
- ЭНЕРГЕТИКА И ТРАНСПОРТ — патрулирование и мониторинг больших территорий, магистральных сетей, объектов инфраструктуры и путей сообщения; разведка и картография с высоким разрешением;
- ПРОМЫШЛЕННОСТЬ — взаимодействие с опасными для человека веществами; перенос материалов, оборудования, образцов (грунта, кернов, воды);
- СЕЛЬСКОЕ ХОЗЯЙСТВО — дистанционный мониторинг сельскохозяйственных животных, посевных и лесохозяйственных угодий.
- ПОИСКОВО-СПАСАТЕЛЬНЫЕ РАБОТЫ — работа в районах, пострадавших от катастроф, поиск людей, перенос санитарных принадлежностей, тактического оборудования;
- РАЗВЛЕЧЕНИЯ И ФИДЖИТАЛ-СПОРТ — выполнение развлекательных сценариев (загородный отдых, выставки, диджитал-арт), аватар для фиджитал-спортивных игр;
- ПЕРСОНАЛЬНАЯ РОБОТОТЕХНИКА — личный интеллектуальный помощник, способный действовать в реальном мире. Компаньон для лиц с ограниченными возможностями здоровья;
- ОБРАЗОВАНИЕ — Обучение робототехнике и пилотированию наземных роботизированных платформ для разных целей.
Ключевые особенности шагающей машины:
- ЭНЕРГОЭФФЕКТИВНОСТЬ И АВТОНОМНОСТЬ — экономное потребление энергии от аккумуляторной батареи. С двигателем внутреннего сгорания автономность в 40 раз больше, чем у всех существующих аналогов (около 9 дней или 216 часов). Что позволяет выполнять миссии на больших расстояниях или с длительными перерывами.
- МОБИЛЬНОСТЬ И ПРОХОДИМОСТЬ — большая мощность позволяет преодолевать сложные препятствия: лестницы (включая вертикальные), каменные завалы, сугробы.
- ГРУЗОПОДЪЁМНОСТЬ — полезная нагрузка составляет не менее 100 кг
- МОДУЛЬНОСТЬ И ГИБКОСТЬ — возможность использовать различные комбинации специализированных датчиков и навесного оборудования (лидары, микрофоны, камеры, датчики температуры, влажности, инерциальные измерительные блоки и т.д.)
- СТОИМОСТЬ — сравнительная простота конструкции пневматических движителей снижает общие затраты на производство.
Наша команда
Быков Алексей (founder) — технический директор, инженер-конструктор, программист встроенных систем. Специалист с 20-летним опытом в разработке компьютерных игр, проектировании и изготовлении тренажёров эксплуатации морской, железнодорожной и космической техники, а также пневматического оборудования для промышленной автоматизации (ex: JetBrains, Steor, Транзас, LG).
Ермолаева Саргылана (co-founder) — управление проектом, специалист по машинному обучению и анализу данных. Магистр прикладной математики и физики (МФТИ). Опыт 15+ лет в frontend-разработке, физической реабилитации, а также в руководстве исследовательскими и образовательными проектами.
Дудинский Юлиус — разработчик ПО с опытом более 25 лет, программист С++, Java. Магистр математики. Имеет опыт руководства отделом и собственный опыт разработки ПО в области компьютерного зрения и инженерных систем, связанных с навигацией, а также компьютерных игр на разных платформах (ex: LG, Транзас, Navis)
Презентации

Пульс
Новость
Мы стали резидентами бизнес-инкубатора «INGRIA» (Санкт-Петербург)

Новость
Победили в акселераторе «Физтех.Идея»

