

Описание проекта
В настощий момент времени в подвеске ж/д экипажей используются неуправляемые гидравлические или фрикционные гасители колебаний. Это влечет за собой такие последствия как:
-Пониженные показатели комфорта, безопасности движения
-Понижение показателя плавности хода экипажей подвижного состава
-Увеличение износа рельсов и колесной пары
Для устранения данной проблемы предлагается использование нового адаптивного закона управления, активной подвеской в ж/д экипажах, при условиях значительных параметрических возмущений.
Преимущества, которые дает такой подход:
- Увеличение безопасности за счет постоянного обеспечения сцепления с дорогой вне зависимости от условий.
- Обеспечение постоянного показателя комфортности для пассажиров вне зависимости от условий эксплуатации
- Обеспчение эффетивной работы демпфера при многообразии условий движния ж/д экипажа
- Снижение взаимного влияния компонентов экипажа друг на друга
Особенности построения:
- Подвеска включает нерегулируемую пружину и регулируемый магнитореологический демпфер.
- Подсистема включает в себя управляющий МК, датчики ускорения и взаимного положения, источник управляющего напряжения, который управляет самим демпфером.
- Подвеска требует минимум настроек
- При выходе из строя становится пассивной подвеской со средними заранее настроенными параметрами
- Демпфер может быть использован в различных точках подвески
Презентации
Пульс
Новость
Проведена встреча с трекером
Новость
Подведение предварительных итогов работы над проектом
Новость
Анализ применения управляемого демпфера в различных типах подвески подвижного состава
Новость
Построение иммитационной модели в программном комплексе
Новость
Приблизительное формирование основных пунктов бизнес модели проекта
Новость
Обсуждение собранных материалов по теме проекта
Новость
Составление блок схемы алгоритма управления микроконтроллера
Новость
Обсуждение компоновки макета
Инициация идеи и проекта
Обсуждение задач, которые должны быть выполнены и составление плана мероприятий
Акселерация
Встреча с наставником. Изучение метода "SkyHook" по управлению магнитореологическим демпфером в подвеске транспортного средства
Новость
Подготвка проекта к предварительной защите
Новость
Работа с трекером
Новость
Встреча с ментором от РЖД. Обсуждались текущие проблеммы потенциальных заказчиков, и был предложен вариант их решения.
Новость
Встреча с трекером, обсуждение плана развития проекта со стороны клиентоориентированности
Новость
Изучен программный инструмент "Универсальный Механизм", для выяснения работоспособности гипотезы
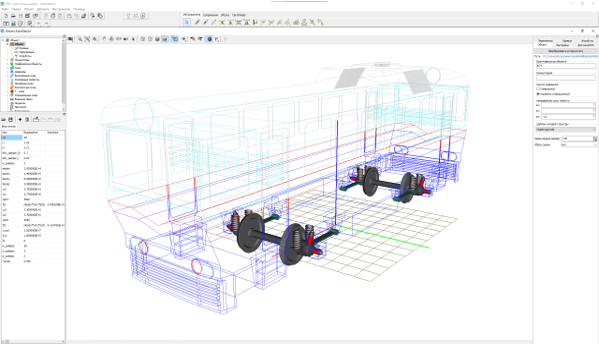
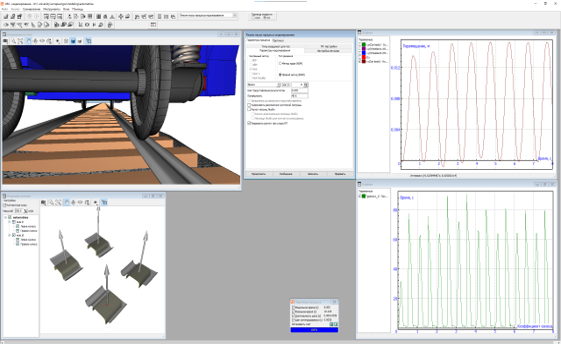
Новость
Обсудили существующие решения поставленной проблемы
Новость
Обсудили общее состояние проекта. Обозначили основные задачи.