
Описание проекта
Продукт предназначен для реабилитации сустава кисти руки у людей с нарушением двигательных навыков вследствие инсульта, черепно-мозговой травмы и других заболеваний центральной нервной системы.
Ежегодно в России регистрируется более 450 тысяч случаев инсульта. Среди пациентов, перенесших инсульт, к трудовой деятельности возвращаются лишь 10% пациентов, а 85% требуют постоянной медико-социальной поддержки, из которых 25% больных остаются до конца жизни глубокими инвалидами. Приведенная выше статистика демонстрирует нам, что ежегодно количество людей, которым необходима реабилитация терапия после перенесенного инсульта, неустанно растет. Представленные на данный момент решения на российском рынке реабилитации в области терапии сустава кисти руки могут позволить контролировать только один тип движения из возможных трех базовых. Также большинство аналогов поддерживает только один режим реабилитации. Данную проблему можно решить с помощью параллельного сферического манипулятора, верхняя платформа которого поддерживает 3 существующие степени свободы соответственно может поддерживать три типа движения руки в соответствии с анатомическими ограничениями:
1. Сгибание и разгибание: поворот вокруг оси Y от -85 до 85 градусов
2. Отведение запястья и аддукция: поворот вокруг оси X от -30 до 40 градусов
3. Супинация и пронация: поворот вокруг оси Z от 0 до 180 градусов
Планируется разработка моделей управления роботом в трех возможных режимах реабилитации:
- Демонстрационный режим (робот движется по заданной траектории показывая пользователю упражнение)
- Режим ассистента (робот корректирует движение, совершаемое пользователем, с заданным уровнем усилия)
- Режим тренера (робот препятствует прохождению целевой траектории пользователем с заданным уровнем усилия)
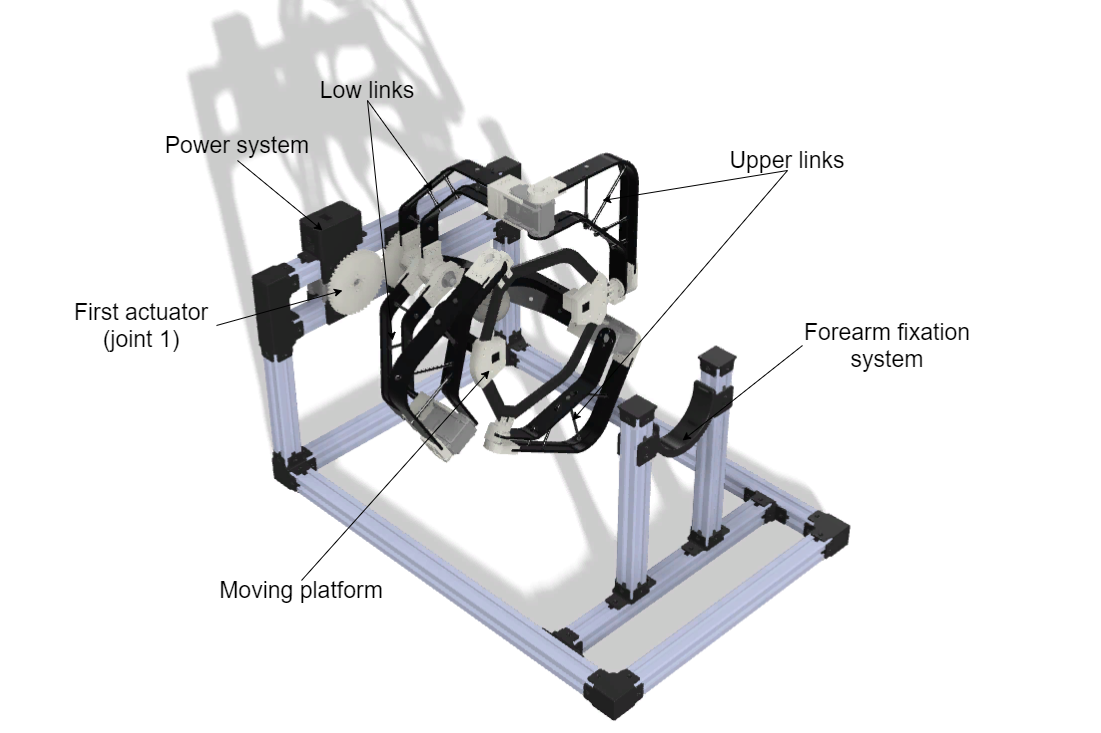
Конструктивно робот состоит из базового кольца (относительно оси которого будут двигаться опорные плечи робота), 3 приводов, 3 нижних звеньев (опорных плеч), 3 верхних звеньев и верхней платформы. Повороты верхней платформы осуществляется за счет приводов, которые приводят в движение опорные плечи.