

Описание проекта
Разрабатывается высокоманевренное многосредное транспортное средство (ТС) с применением гибридного движителя нового типа AquaWheel.
Ключевая технология: Движитель нового типа AquaWheel, представляющий гибрид колеса и циклического лопастного движителя, располагается по бортам судна/амфибии подобно колесам наземных ТС. Движитель включает встроенные в диск колеса гидродинамические лопатки с циклически изменяющимся углом атаки, таким образом при вращении движителя через его лопастную часть эффективно прокачивается среда (вода, воздух, водовоздушная смесь) за счет чего создается строго направленная, перпендикулярная оси вращения ротора гидродинамическая тяга.
Маневренность: Движитель AquaWheel обладает функцией управления вектора тяги (УВТ), т.е. позволяет оперативное (<0,5с) изменение направления гидродинамической тяги в плоскости вращения ротора на ±180 градусов без изменения оборотов и ориентации ротора. За счет применения УВТ, движущееся в водной среде ТС может активно тормозить реверсированием тяги, разворачиваться на месте, управлять углами крена и дифферента, компенсировать качку, а также регулировать степень погружения ТС в целом.
Многосредность: Бортовое расположение гибридных движителей и наличие полужесткого обода на внешней части позволяют использование AquaWheel в режиме обычного колеса для движения ТС по дну водоема, отмели, берегу, дорогам и т.д. Смена режимов водный/наземный происходит бесшовно, без наличия "мертвых" зон, присущих амфибийным ТС с пространственно-разнесенными наземными и водными движителями. За счет управления вектором гидродинамической тяги на движителях, так же бесшовно происходит и смена режимов надводный/подводный.
Назначение: Совокупность названных качеств движителя AquaWheel позволяет создавать на его основе многосредные высокоманевренные транспортные средства для бесшовной доставки пассажиров/грузов/целевой нагрузки по сложным маршрутам с многократным пересечением границ разных сред. Возможна разработка беспилотных многосредных высокоманевренных аппаратов, способных выполнять комплексные миссии на суше и в водной среде в автоматическом режиме или в режиме телеуправления.
Потребители и рынки: Пилотируемые ТС могут быть использованы спасателями, службами природоохраны, подразделениями МЧС, военными и др. силовыми структурами (сектор B2G), геологами и нефтяниками (B2B), охотниками, рыбаками, туристами и спортсменами (B2C). Беспилотные ТС могут использоваться для научных исследований, для охраны и мониторинга морской, прибрежной, портовой инфраструктуры, доставки грузов с берега на морское дно (зондов, датчиков, маяков и др.) и т.д.
Презентации
Пульс
Новость
Получен отзыв на проект от Крыловского научного центра.
Отзыв Крыловского научного центра.pdfНовость
Проект был представлен на семинаре "Морская робототехника" в Санкт-Петербургском государственном морском техническом университете (СПбГМТУ). В результате получены письма поддержки Проекта.
Новость
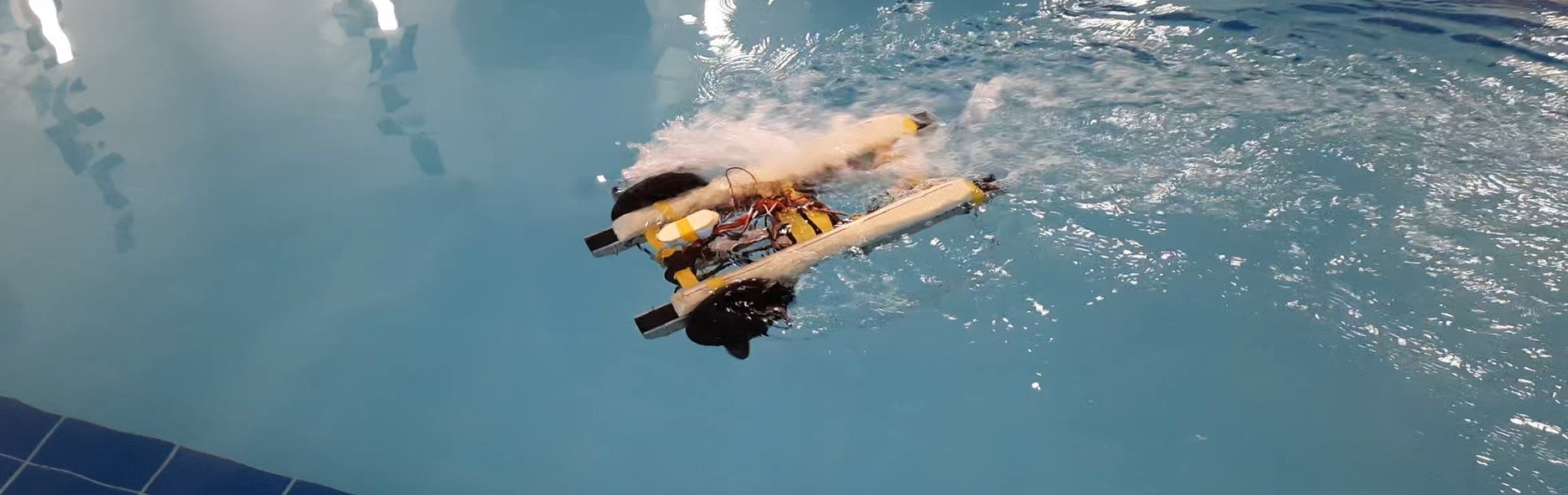
Прототип с 2-мя и 4-мя движителями испытан в бассейне. Продемонстрирована эффективность движения аппарата в надводном режиме, возможность бесшовного перехода аппарата из надводного режима в подводный, возможность качения по дну в подводном режиме, высокая маневренность аппарата под водой (повороты на месте вокруг трех осей и их комбинации). Применение управляемого вектора тяги обеспечивает высокую управляемость аппарата под водой при наличии только двух движителей с УВТ.
Запуск прототипа
Собран дистанционно управляемый прототип многосредного аппарата на 4 движителях Аквавил. Проведены испытания на открытой воде. Предемонстированы высокая маневренность аппарата в водной среде (разворот на месте, повороты аппарата по крену и тангажу, реверсирование тяги и др. Продемонстрирована возможность бесшовного перехода аппарата из водного режима в наземный и наоборот.
Инициация идеи и проекта
Первые результаты испытания движителя на стенде был представлены экспертам на заседании рабочей группы Маринет. Проект получил высокую оценку. Получено письмо поддержки.
С.Г. Полякову - НТИ МАРИНЕТ.pdf