
Описание проекта
Цель проекта
Разработка устройства помогающего в работе с тяжёлыми грузами, в условиях с повышенной опасностью, повышающее силу сжатия оператора с корпусом защищающим от внешних воздействий.
Общее описание
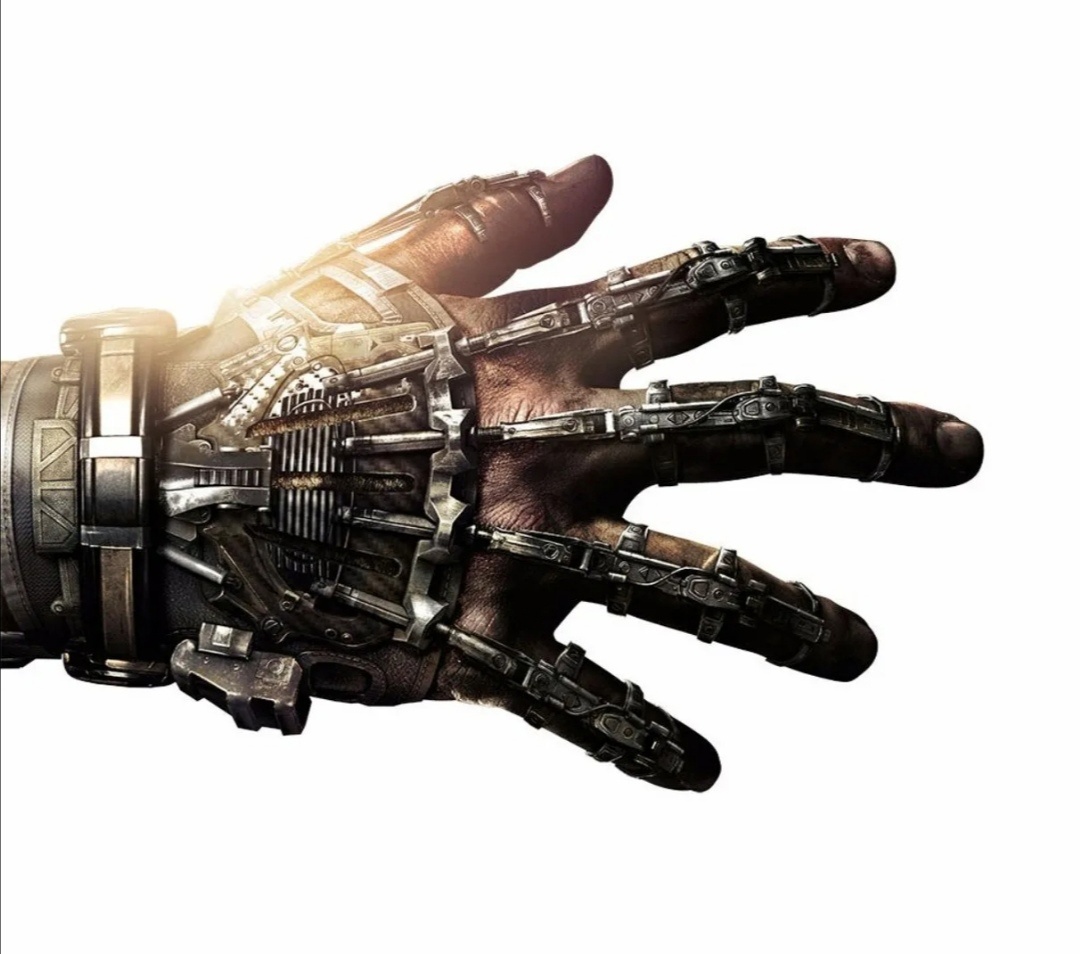
Экзоперчатка с силомоментной обратной связью, усиливающая движение за счёт передачи усилия через тросики от устройства исполнения. Обладает функцией сбора хранения, обработки данных с системы датчиков и передачи в исполнительную часть.
Вид экзоскелета: кистевой; механизм актуатора: тросиковый с сервоприводом; тип резистивных датчиков: тензорезисторы.
Экзопрерчатка – устройство усиливающее основные направления приложения силы в работе пальцев руки и обеспечивающее некоторую защиту от внешних воздействий на кисть.
Проблема клиента, которую решает проектируемый мехатронный экзоскелет
Когда есть необходимость удерживать в руке тяжелый объект длительное время, сила хвата ослабевает. При этом в ситуациях, когда есть необходимость длительного удержания тяжелого объекта, возникает риск механического повреждения руки.
Причины, по которым имеющиеся решения проблемы недостаточно эффективны:
- Высокая и недоступная цена экзоскелетов для приобретения населением
- Сложность использования, обусловленная устройством механизма
- Нет корпуса, защищающего от механических воздействий и повреждений
- Громоздкие и тяжёлые в использовании механизмы
- Трудно найти запасные детали в случае поломки экзоперчатки
Решение
Разрабатываемая конструкция экзоперчатки состоит из простых, не сложных в производстве, но при этом прочных деталей. Это удешевляет товар относительно аналогов, не снизив надёжность перчатки. Многие детали можно распечатать на 3д принтере, что позволяет легко получить запасную деталь.
Корпус устроен таким образом, что полностью забирает всю нагрузку с суставов человека на себя. Также жёсткий корпус защитит оператора он многих внешних вредоносных воздействий.
Экзоперчатка проста в управлении: от оператора не требуется никаких дополнительных действий или особых навыков, перчатка полностью повторяет движение руки человека внутри неё и усиливает их до необходимого уровня, в зависимости от силы приложенной человеком.
Устройство
Механическая система содержит несколько составных частей. Прежде всего рассмотрим механизм усиливающий движение. «Мышцами» в данной работе выступят сервоприводы. Для того чтобы они не сковывали движение пальцев, их расположим на предплечье. Передача усилия будет происходить через струны. Каждый отдельный сервопривод будет связан со своим пальцем и отвечать за движение либо дистальной фаланги либо проксимальной.
Жесткий каркас может перераспределить часть или даже всю нагрузку на шарниры, обеспечить защиту от переломов фаланг и суставов. Непосредственно на каркасе располагаются уже все остальные части устройства.
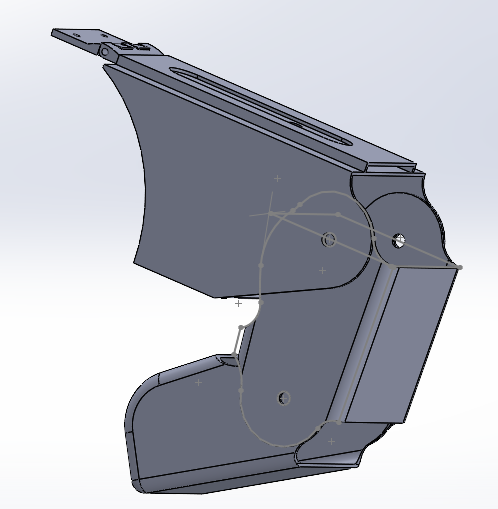
Принцип создания перчатки: из листа стали вырезается необходимая форма, после обработки сгибается в нужных местах и соединяется. Все полученные детали в дальнейшем соединяются различными способами.
Размеры деталей определяются параметрами руки человека, для которого делается экзоперчатка.
При составлении размеров перчатки необходимо учесть, что размеры деталей не равны параметрам кисти, а берутся с запасом, для таких вещей как мягкая прокладка, утолщения механических соединений, датчиков, проводов и др.
В зависимости от полученных размеров, меняются длина, ширина, высота и некоторые другие составляющие чертежа детали корпуса.
Управление экзоперчаткой происходит с помощью тензорезисторов. Для эффективного детектирования необходимо расположить по 4 датчика на каждом пальце. Два на дистальную фалангу, первый крепится напротив подушечки пальца и выявляет движение направленное на сжатие. Второй датчик располагается над ногтем и снимает движение ориентированное на разжатие. Подобным образом крепятся остальные два тензорезистора, но уже на проксимальную фалангу.
При возникновении усилия в каком либо направлении, подаётся сигнал о включении исполнительной части, воздействие которой направлено в сторону увеличения усилия, побудившего сигнал. Мощность исполнительной части соответственно возрастает тем сильней, чем больше давление оказывается на датчик.
Потребители
Роскосмос, МЧС, ВС РФ, Производства с потребностью рабочим переносить тяжёлые грузы, ФАР
http://ekzoperchatkargrtu.tilda.wsПрезентации

Пульс
Новость
Разработана 3д модель пальца экзоперчатки