Описание проекта
Цель - создание автоматической транспортной платформы (AGV) с микроконтроллерным управлением, способной с помощью зацепного устройства осуществлять фиксацию и перевозку прицепов с грузом по заданному маршруту.
Задачи проекта:
- разработать и собрать зацепное устройство (пин);
- обновить программное обеспечение для датчика магнитной линии;
- разработать операционную систему для записи алгоритмов работы;
- сделать док-станцию для зарядки аккумулятора.
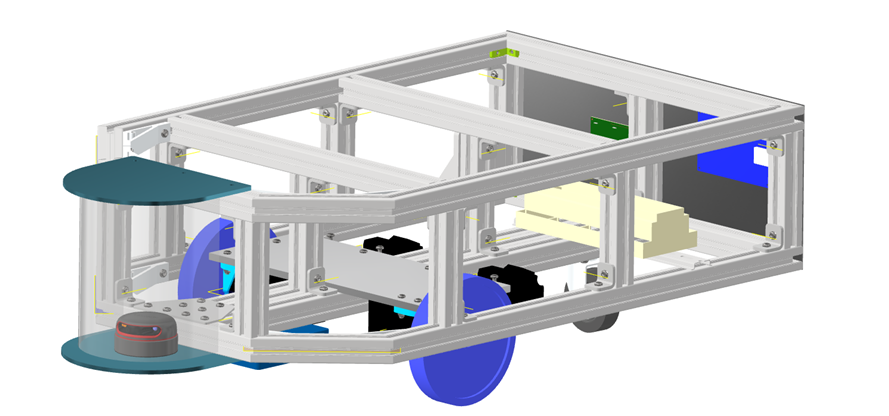
Автоматическая транспортная платформа с микроконтроллерным управлением (AGV), предназначенная для автоматического перемещения грузов на производствах и складских хозяйствах. Платформа автоматически перемещается по траектории (задается линией, нанесенной на полу), останавливается в заданных точках для погрузки/разгрузки груза. Платформа оснащена системой предупреждений столкновений. На данный момент изготовлено 2 полностью работоспособных опытных образца, способных перемещать по 20 кг груза. Имеется возможность разработки платформ под конкретные требования заказчика.
Потребительские сегменты: промышленные производства и автоматические складские хозяйства (например, АвтоВАЗ).
Главным источником дохода будет являться продажа физических платформ, а также предоставление услуг по настройке, обновлению и технической поддержке.
Ценностное предложение: 1. Автоматизация процесса транспортировки грузов; 2. Эффективное использование технологий микроконтроллерного управления; 3. Увеличение производительности; 4. Снижение операционных расходов:
AGV с микроконтроллерным управлением представляет собой инновационное решение, способное повысить эффективность, снизить операционные расходы и улучшить общую конкурентоспособность промышленных предприятий. Возможность работы с грузами массой до 40 кг и максимальная скорость 3 км/ч обеспечивают эффективное перемещение грузов на короткие и средние расстояния, что является ключевым преимуществом в условиях современной промышленности.
Данный проект c уровня TRL-3 перешел на уровень TRL-4. На данный момент уже изготовлен макет мобильной платформы с электроприводом и модулем управления на борту платформы. Макет способен перемещаться по контрастной линии. Попутно в программном обеспечении рассматриваются (прописываются) алгоритмы автоматического управления для более точного динамического перемещения по линии, что обеспечивает демонстрацию работы в реалистичных условиях.